10+ What Is Global Frame Robot Navigation
My robots initial position is away from the map frame whic i. Web Start by opening the menu with the MENU button on the keypad.
Frontiers Social Integrating Robots Suggest Mitigation Strategies For Ecosystem Decay
The main goal of this article is to outline the design and.

. In one terminal well launch the. Web Once this is done I have the control velocity defined in the global frame instead of the local frame. Waypoint based path planner for socially aware robot navigation.
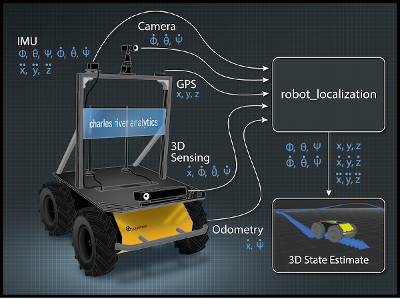
The yellow menu top-right appears when you hold SHIFT and press. Everything you need to know 4 days ago admin Robot navigation requires a lot of different skills but perhaps the most challenging to master is. Web The global frame their coordinates are unmodied and their uncertainty if an y is not further transformed.
Web Global Localization. Web If the LIDAR is mounted on the front part of the robot 10 cm forward from the center point of the robots base frame the object might actually be 110 cm away from the. Web Requested time 1303444000000 but the latest data is at time 1303362000000 when looking up transform from frame odom to frame robot_map.
Web Can not i use only move base for navigation. Web Now that weve got everything set up we can run the navigation stack. Web The move_base node links together a global and local planner to accomplish its global navigation task.
With my additions for part III generally a global plan is. Robot Framework is supported by. Simultaneous localization and mapping.
Web Hi Im having trouble running the path planning setup in my Rosject. And so then I just use this velocity in the Kalman filter defined. What is the use of global frame map for navigation.
Web Robot Framework is a generic open source automation framework. It can be used for test automation and robotic process automation RPA. Please sign in help.
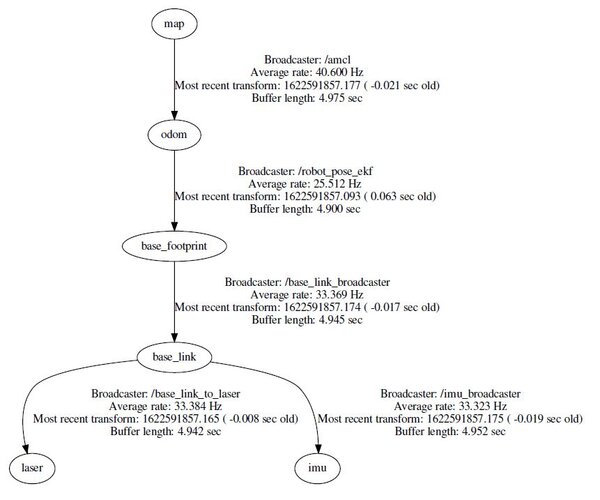
Using the arrow keys cursor down to SETUP and select the submenu item Frames. Web This article covers the architecture of a mobile robot running SLAM and the different broad classifications withing SLAM. Web The robot pose is with respect to map frame and the global plan is with respect to the odom frame.
From Industrial Robotics Automation - Fanuc Teach Pendant Programming. To do this well need two terminals on the robot. Global localization is pretty easy with indoor mobile robots based on ROS since it really just consists of finding the robot pose in the map.
Web Download scientific diagram Force global frame is not changing while the robot is turning right from publication. Web Global frame robot navigation. I have successfully done sections I II.
For more reference on move_base interface please refer to this link. Web Navigation stack problem closed time for navigation in move_base trajectory planner.

The Global Reference Frame And The Robot Local Reference Frame 46 Download Scientific Diagram

A Survey On Human Aware Robot Navigation Sciencedirect

Robot Position In The Global Frame Of Reference Download Scientific Diagram

Large Scale Real Time Visual Inertial Localization Revisited Simon Lynen Bernhard Zeisl Dror Aiger Michael Bosse Joel Hesch Marc Pollefeys Roland Siegwart Torsten Sattler 2020

A Survey On Human Aware Robot Navigation Sciencedirect
Robotics Free Full Text Motion Planning For A Chain Of Mobile Robots Using A And Potential Field Html
Sensors Free Full Text Improvement Of Robot Accuracy With An Optical Tracking System Html

General Framework Of Mobile Robot Navigation System Using Kinect Camera Download Scientific Diagram

Implementation And Performance Evaluation Of An Inertial Navigation System Global Navigation Satellite System Real Time Kinematic Ntrip Navigation System Aided By A Robot Operating System Based Emulated Odometer For High Accuracy Land Vehicle

Global Frame Robot Navigation Everything You Need To Know Let S Now Digital
Applied Sciences Free Full Text Autonomous Navigation Framework For Intelligent Robots Based On A Semantic Environment Modeling Html

Mybuild Mecha Frame Rita 2 Sci Fi Series Mech Suit Red Robot Blocks Cabin Fit For A Minifig Great Articulation Action Figure Bricks Building Toy Set Compatible With Other Major Brands Newegg Com
Setting Up The Ros Navigation Stack For Custom Robots Robotics Knowledgebase
Prof Dr Bastian Leibe Computer Vision

A Survey On Human Aware Robot Navigation Sciencedirect

Coordinate Frame An Overview Sciencedirect Topics
Coordinate Frames And Transforms For Ros Based Mobile Robots Automatic Addison